
Team Goals
Our first team goal is to develop a paradigm using a robotic manipulandum to quantify spasticity. Using these measurements and determined parameters, our next goal is to build a device that can measure spasticity in a clinical setting. We also hope to submit an official scholarly article to a scientific journal.
Scope of the Project
Throughout the duration of the project, regular meetings with therapists and patients will be held to ensure the usability and applicability of the device and quantification scheme. To construct a viable device capable of measuring biomedical parameters, extensive knowledge in mechanical and physiological systems, materials science, electrical circuitry, and programming will be necessary.
For the validation scheme, carrying out successful experiments with the robotic manipulandum will necessitate expertise in programming, 3D printing, kinematics, data analysis techniques, and patient care.
Duration and time commitment
Within the first semester, our ultimate goal is to create an initial working prototype. Additionally, we will design an experimental paradigm to extract appropriate parameters for proper implementation of the device. Next semester, additional testing will be performed with both the experimental paradigm and device. Further data collection and analysis will be utilized to validate the clinical application of the device as a quantification scheme.
Due to the experimental nature of this project, we understand that it requires an immense time commitment. We foresee spending from 25-40 hours per week per team member – not including travel time to the NRH. Though, if the project requires more attention, we are in no means limiting ourselves to 40 hours per week.
Members and Roles
- Laith Alhussein – Team Leader
- Mohamed Ali – Data Analyst
- David Remer – Tech Leader
- Kathryn Radom – Manager and Program Leader
Desired End Product
By the end of this project, we intend to have a fully functional, user accessible and thoroughly validated device capable of quantifying spasticity. Our validation scheme will be based on the research-proven INMOTION robotic manipulandum paradigm and results.
Deliverables
Semester 1:
- 3D printed handle and arm rest for robotic manipulandum at NRH laboratory
- Code for experimental paradigm (using the robot)
- Data from the robot (in a MATLAB format)
- EMG data
- Initial proof of concept
- Functional prototype of device
- Data from the device
- Preliminary analysis of results
Semester 2:
- Full patient data with robot acquired
- Testing device on patients
- Final prototype
- Completed analysis of results
- Final report
Supporting Resources
Our mentor Dr. Wilsaan Joiner will be assisting us with project guidance as well as financial support. Our co-mentor, Dr. Michelle Harris-Love, will provide access to physical and occupational therapists, patient recruitment, and IRB approval.
The INMOTION robotic arm in Dr. Harris-Love’s lab (at the NRH) will be used to provide data for validation of the device. The KINARM robot in Dr. Joiner’s lab will allow us to perform initial code testing which will be modified for use in the INMOTION arm.
Unusual Circumstances
In the event that a team member is unable to fulfill their responsibility, other team members will equally divide the remaining work.
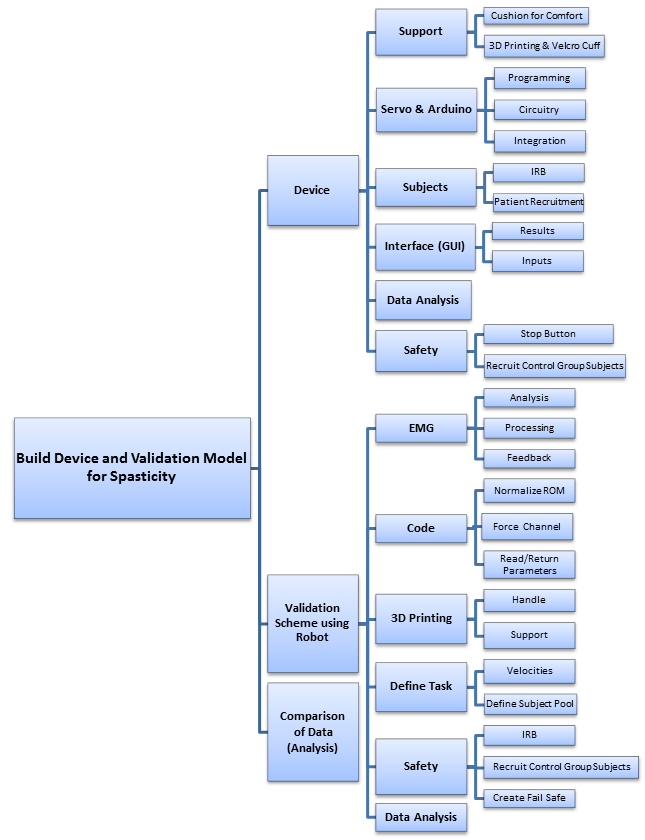
Work Breakdown Structure
Linear Responsibility Chart

Percent Complete Matrix

Gantt Chart
View here: Team 1 Gantt Chart
Leave a Reply